
变废为宝:机器人技术如何重塑建筑废弃物分拣方式?
- RECONMATIC
- 2025年11月24日
- 讀畢需時 3 分鐘
自动化的发展正在开启建筑行业在循环经济实践上的新纪元,阿卡斯-卡利斯托(A&C)参与的欧盟合作项目 RECONMATIC,目前也是中国科技部的国家重点研发项目——“面向可持续和可循环建筑废弃物管理的解决方案关键技术研究”正走在该趋势的最前端。该项目通过开发用于建筑与拆除废弃物离线分拣的智能机器人系统,为更安全、更智能、更可持续的建筑环境铺平道路。
建筑废弃物管理的一大挑战:废弃物流的复杂性
建筑和拆除现场产生的废弃物高度异质化。混凝土、陶瓷、木材、石膏板、塑料,以及石膏或石棉等污染性材料常常混在一起,使自动化分拣面临巨大挑战。传统分拣系统高度依赖人工或简单机械的方式,效率非常有限,同时安全风险高,再生材料的质量也难以保障。
为了满足对高纯度、高质量再生材料的需求,RECONMATIC 的合作伙伴,来自西班牙的 TECNALIA 机器人团队着手开发了一种融合多传感器集成、AI 材料识别与机器人分拣的智能解决方案。(TECNALIA 是西班牙最大的应用研究和技术开发中心,是欧洲的标杆,也是 Basque 研究与技术联盟的成员。)
基于 AI 的废弃物检测与分类技术
项目早期的一项重大突破,是将 RGB 可见光、3D 激光、近红外高光谱等多种传感器进行整合,并进行几何校准和空间同步,最终构建出一个独特的多光谱超立方体。
这个超立方体是创建建筑废弃物碎片数据集的主要输入,通过半自动方式进行切割与标注,随后用于训练深度学习模型,以识别建筑废弃物中不同材料。
在实际操作中,系统会实时生成超立方体,并输入深度学习模型,推断未知物体每个像素的材料类型,识别物体形状,并计算最佳抓取点,使机器人能够从传送带上的主废弃物流中精准取出不需要的污染物。

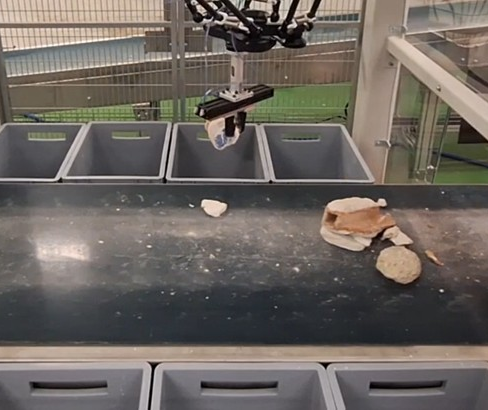
机器人分拣单元
整个解决方案的核心是一套自动化机器人分拣单元,包括:
RGB、3D 激光和 NIR 传感器;
经过训练、可进行实时材料分类的深度学习模型,且分类准确率高;
一款定制的多用途夹爪,结合机械手指与真空吸附,可同时处理重物与轻物;
一套“抓取—投掷”控制算法,使 Omron Quattro 机器人能够将废弃物“投掷”到目标箱,而非传统的放置方式,从而大幅提升效率。
这种混合式设计让机器人能够充当“最终分拣员”,重点移除石膏、塑料、木材以及潜在的玻璃等污染物,显著提升最终产品的纯度。



真实场景应用:RECSO 工厂试点
该系统目前正在 TECNALIA 内部开发,并将在 RECSO 工厂进行演示与性能评估。(RECSO 公司同样作为RECONMATIC 项目合作伙伴之一,是西班牙一家全面回收利用建筑与拆除废弃物的领先企业。)
在产品化后,这款由 RECONMATIC 开发的废弃物分拣机器人,将部署在目前由工人执行最终人工分拣的工作舱。机器人将用于搬运大量废弃物,从而帮助工人减少工伤风险,同时通过降低化学和视觉污染物来提升最终的产品质量和市场认可度。
可以说, 机器人技术已不再只是提升效率和减少工人的工作风险,它正在提高废弃物被回收和再利用的价值,也请期待 RECONMATIC 项目在自动化与可持续性领域的下一步突破!


